CS460 Advanced Animation and Modeling
Personal custom engine using C++ and Vulkan
glTF format with vertex skinning
Key-frame System using VQS structure
Joint control and bone rendering
Inverse kinematics implemented with Forward And Backward Reaching Inverse Kinematics (FABRIK)
Quaternion for internal orientation control
Path Following with ease-in/ease-out and speed/orientation control
Curve generation using Centripetal Catmull–Rom spline
Computing Arc-length using adaptive approach
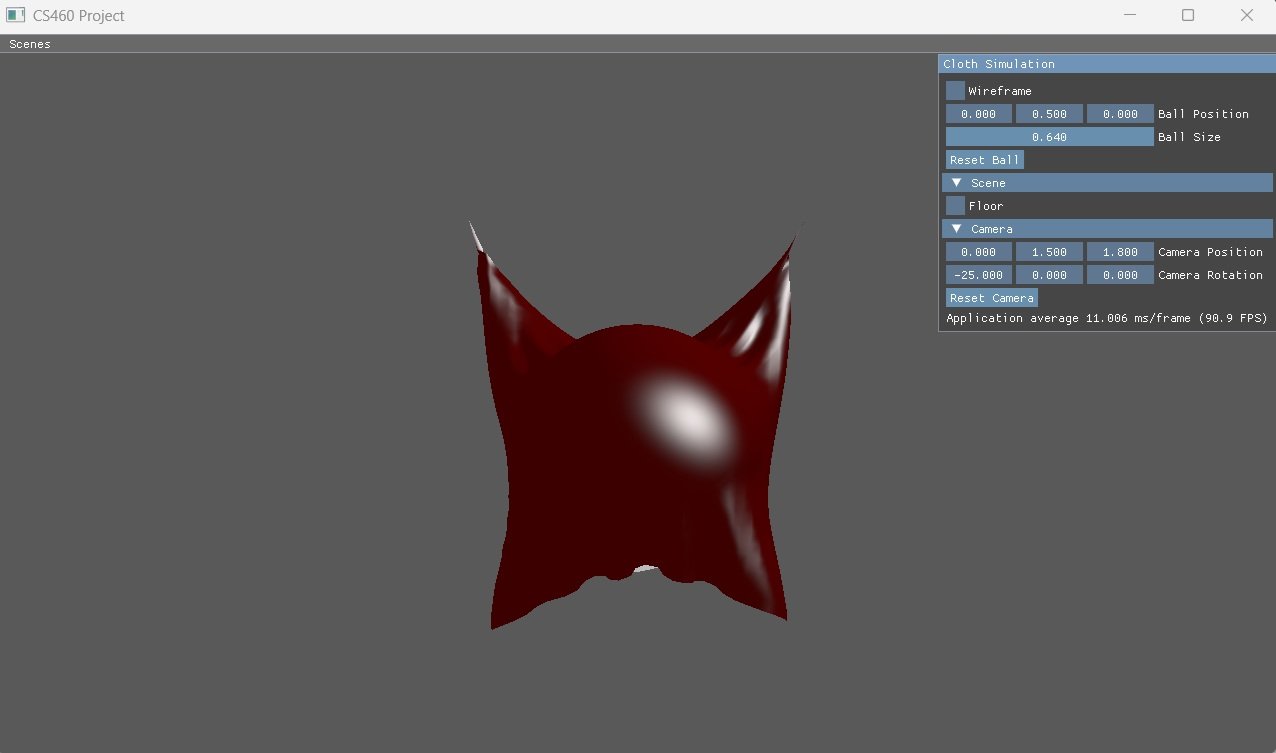
Physically based animation
Cloth simulation using Fourth Order Runge-Kutta method
Mass-spring-damper system